
This transducer converter module has been designed to meet the numerous requests of our customers to transform the signal of some position / speed transducers into a TTL encoder.
Keeping the same hardware we can modify the firmware of the transducer converter to adapt it to various transducer models, also on specific customer request; the models currently available are shown below.
The function of these modules is not limited only to the conversion of the transducers, but thanks to the various analog and digital I/O and to a performing microcontroller it is possible to realize fast readings of signals, verification of motors speed, mathematical operations.
Contact us for more information or to explain your need, we will be happy to analyze the problem and propose our solution.
Functions common to all models
- All the commands are opto-isolated and operate at 24Vdc in positive logic and can be generated by: buttons, relay contacts, PLC outputs, etc. and come from one or more points.
- The digital outputs are opto-isolated, operate at 24Vdc in positive logic and are electronically protected against overload and short circuit. The status of the commands and outputs is displayed with LEDs.
- All settings are made with a PC connected to the USB port of the module using the software provided by ALTER, and stored internally in the module. The set parameters can be transferred to the PC for archiving and subsequently transferred to the module.
- The alarms are stored in the module, can be viewed via the PC and reset via a special digital input, the alarm condition is signaled on a special digital output.
Available models
The purpose of this product is to convert the signal of a resolver, even multipolar, into a "simulated encoder" (TTL line driver 5V). This type of conversion is ideal when you need to read the position of a resolver with an equipment that only provides input for TTL encoders.
The main features of this product are:
- The resolver can be powered directly by the 13/009 module or by an external card (the module is connected in parallel with the customer card).
- Possibility to change the number of pulses / revolution (PPR) of the simulated encoder output.
- No. 1 analogue output (± 10V) for the resolver speed signal.
- No. 3 digital outputs to signal the exceeding of a speed threshold that can be set for each output.
- No. 1 line-driver output of the speed signal in frequency / direction format.
Download
There are no download items matching this shortcode criteria.
The purpose of this product is to convert the signal of a rotary EnDat encoder (single or multi-turn) into a "simulated encoder" (TTL line driver 5V) with hall sectors. This type of conversion is ideal when you need to read the position of an EnDat encoder with an equipment that only provides input for TTL encoders.
The main features of this product are:
- Compatible with EnDat 2.1 or 2.2 protocol (with or without incremental signals), clock up to 16 MHz.
- ZWM (Zero Without Motion) function to initialize zero position on the ttl encoder side without real motor movement.
- Simulated hall sectors outputs for brushless motor control (up to 20 poles).
- Possibility of simulated phase variation between encoder and electric motor windings: useful for adapting the servo inverter to the motor.
- Possibility to reduce the number of pulses / revolution (PPR) of the simulated encoder output with respect to the EnDat encoder resolution.
- No. 1 line-driver output of the speed signal in frequency / direction format.
- Digital outputs to report:
- OK module (no alarm).
- Initialized encoder.
- Simulated encoder zero position reached.
- ZWM function in progress.
- Aborted ZWM function.
Download
There are no download items matching this shortcode criteria.
The purpose of this product is to convert the signal of a rotary serial encoder (PulseCoder Fanuc or Mitsubishi) into a "simulated encoder" (TTL line driver 5V) with hall sectors. This type of conversion is ideal when one needs to read the position of a FANUC PulseCoder with an equipment that only provides input for a TTL encoder.
The main features of this product are:
- Compatible with the following serial encoders:
- FANUC:
- αi64 (Type: A860-0365).
- αiAR128 (Type: A860-2010-T341).
- αiA1000 (Type: A860-2000).
- α64iA (Type: A860-2014-T301).
- αA64 (Type: A860-0360-V501 and Type: A860-0360-T001).
- αiA16000 (Type: A860-2001-T301).
- βiA128 (Type: A860-2020-T301).
- αA1000 (Type: A860-0370-V502).
- MITSUBISHI:
- OSA17
- OSA18-130.
- HA300NC-S.
- HC-SF
- HF303BS-A48.
- FANUC:
- Simulated hall sectors outputs for brushless motor control.
- Possibility of simulated phase variation between encoder and electric motor windings: useful for adapting the servo inverter to the motor.
- Possibility to change the number of pulses / revolution (PPR) of the simulated encoder output.
- No. 1 line-driver output of the speed signal in frequency / direction format.
- Digital outputs to report:
- OK module (no alarm).
- Initialized communication.Initialized position.
- Various communication errors or internal encoder errors.
- Analog output to indicate the angular position of the encoder.
Download

Instruction book in English language for converter module serial encoder (Fanuc or Mitsubishi) to TTL Encoder
The purpose of this product is to convert the signal of a linear EnDat encoder into a "simulated encoder" (TTL line driver 5V) and was created to solve the compatibility problems between EnDat optical lines and numerical controls that only require encoder input TTL.
The main features of this product are:
- Compatible with EnDat 2.1 or 2.2 protocol (with or without incremental signals), with 5Vdc power supply.
- ZWM (Zero Without Motion) function to initialize zero position on the ttl encoder side without actual movement of the axis.
- "Fault" signal sent to the "simulated encoder" output (corresponds to the "UaS" signal present in some TTL encoders).
- Possibility to reduce the number of pulses / revolution (PPR), the direction, the zero position of the simulated encoder output with respect to the values read by the EnDat encoder.
- Digital outputs to report:
- OK module (no alarm).
- Initialized encoder.
- Positive axis position.
- Simulated encoder zero position reached.
- ZWM function in progress.
Download
Instruction book in English language for converter module Linear EnDat / TTL encoder
Mechanical dimensions
-
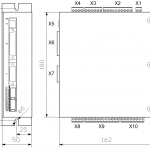
- Module dimensions