
Questo modulo convertitore di trasduttore è stato studiato per soddisfare le numerose richieste dei nostri clienti di poter trasformare il segnale di alcuni trasduttori di posizione/velocità in un encoder TTL.
Mantenendo lo stesso hardware noi possiamo modificare il firmware del convertitore di trasduttore per adattarlo a vari modelli di trasduttori, anche su specifica richiesta del cliente; i modelli disponibili attualmente sono indicati più avanti.
La funzione di questi moduli non si limita solamente alla conversione dei trasduttori, ma grazie ai vari I/O analogici e digitali e ad un performante microcontrollore è possibile realizzare letture veloci di segnali, verifica di velocità dei motori, operazioni matematiche.
Contattataci per avere ulteriori informazioni o per spiegarci la tua necessità, saremo felici di analizzare il problema e proporti la nostra soluzione.
Caratteristiche
Funzioni comuni a tutti i modelli
- Tutti i comandi sono opto-isolati e funzionano a 24Vcc in logica positiva e possono essere generati da: pulsanti, contatti di relè, uscite di PLC, ecc. e provenire da uno o più punti.
- Le uscite digitali sono opto-isolate, funzionano a 24Vcc in logica positiva e sono protette elettronicamente contro il sovraccarico ed il corto circuito. Lo stato dei comandi e delle uscite è visualizzato con Led.
- Tutte le impostazioni sono fatte con un PC collegato alla porta USB del modulo utilizzando il software fornito da ALTER, e vengono memorizzate internamente al modulo. I parametri impostati possono essere trasferiti sul PC per archiviazione e successivamente trasferiti nel modulo.
- Gli allarmi vengono memorizzati nel modulo, possono essere visualizzati tramite il PC e resettati tramite un apposito ingresso digitale, la condizione di allarme viene segnalata su apposita uscita digitale.
Modelli disponibili
Lo scopo di questo prodotto è quello di convertire il segnale di un resolver, anche multipolare, in un “Encoder simulato” (TTL line driver 5V). Questo tipo di conversione è ideale quando si ha il bisogno di leggere la posizione di un resolver con una apparecchiatura che prevede solo ingresso per encoder ttl.
Le caratteristiche principali di questo prodotto sono:
- Il resolver può essere alimentato direttamente dal modulo 13/009 oppure da una scheda esterna (il modulo risulta connesso in parallelo con la scheda del cliente).
- Possibilità di variare il numero di impulsi/giro (PPR) della uscita encoder simulato.
- Nr. 1 uscita analogica (±10V) per il segnale di velocità del resolver.
- Nr. 3 uscite digitali per segnalare il superamento di una soglia di velocità impostabile per ogni uscita.
- Nr. 1 uscita line-driver del segnale di velocità in formato frequenza / direzione.
Download

Manuale istruzioni in lingua italiana per modulo convertitore resolver / Encoder TTL
Lo scopo di questo prodotto è quello di convertire il segnale di un encoder EnDat rotativo (singolo o multi-giro) in un “Encoder simulato” (TTL line driver 5V) con settori hall. Questo tipo di conversione è ideale quando si ha il bisogno di leggere la posizione di un encoder EnDat con una apparecchiatura che prevede solo ingresso per encoder ttl.
Le caratteristiche principali di questo prodotto sono:
- Compatibile con protocollo EnDat 2.1 o 2.2 (con o senza segnali incrementali), clock fino a 16 MHz.
- Funzione ZWM (Zero Without Motion) per inizializzare posizione di zero lato encoder ttl senza movimento reale del motore.
- Uscite settori hall simulati per il controllo di motore brushless (fino a 20 poli).
- Possibilità di variazione fase simulata tra encoder e avvolgimenti elettrici del motore: utile per adattare il servoconvertitore al motore.
- Possibilità di ridurre il numero di impulsi/giro (PPR) della uscita encoder simulato rispetto alla risoluzione dell'encoder EnDat.
- Nr. 1 uscita line-driver del segnale di velocità in formato frequenza / direzione.
- Uscite digitali per segnalare:
- Modulo OK (nessun allarme).
- Encoder inizializzato.
- Raggiunta posizione zero encoder simulato.
- Funzione ZWM in corso.
- Funzione ZWM abortita.
Download
Manuale istruzioni in lingua italiana per modulo convertitore EnDat rotativo / Encoder TTL
Lo scopo di questo prodotto è quello di convertire il segnale di un encoder seriale rotativo (FANUC o Mitsubishi) in un “Encoder simulato” (TTL line driver 5V) con settori hall. Questo tipo di conversione è ideale quando si ha il bisogno di leggere la posizione di un encoder seriale con una apparecchiatura che prevede solo ingresso per encoder ttl.
Le caratteristiche principali di questo prodotto sono:
- Compatibile con i seguenti encoder seriali:
- FANUC:
- αi64 (Type: A860-0365).
- αiAR128 (Type: A860-2010-T341).
- αiA1000 (Type: A860-2000).
- α64iA (Type: A860-2014-T301).
- αA64 (Type: A860-0360-V501 and Type: A860-0360-T001).
- αiA16000 (Type: A860-2001-T301).
- βiA128 (Type: A860-2020-T301).
- αA1000 (Type: A860-0370-V502).
- MITSUBISHI:
- OSA17
- OSA18-130.
- HA300NC-S.
- HC-SF
- HF303BS-A48.
- FANUC:
- Uscite settori hall simulati per il controllo di motore brushless.
- Possibilità di variazione fase simulata tra encoder e avvolgimenti elettrici del motore: utile per adattare il servoconvertitore al motore.
- Possibilità di variare il numero di impulsi/giro (PPR) della uscita encoder simulato.
- Nr. 1 uscita line-driver del segnale di velocità in formato frequenza / direzione.
- Uscite digitali per segnalare:
- Modulo OK (nessun allarme).
- Comunicazione inizializzata.
- Posizione inizializzata.
- Vari errori di comunicazione o interni all'encoder.
- Uscita analogica per indicare la posizione angolare dell'encoder.
Download
Manuale istruzioni in lingua italiana per modulo convertitore encoder seriale (Fanuc o Mitsubishi) in Encoder TTL
Lo scopo di questo prodotto è quello di convertire il segnale di un encoder EnDat lineare in un “Encoder simulato” (TTL line driver 5V) ed è nato per risolvere i problemi di compatibilità fra righe ottiche EnDat e controlli numerici che prevedono solo ingresso da encoder ttl.
Le caratteristiche principali di questo prodotto sono:
- Compatibile con protocollo EnDat 2.1 o 2.2 (con o senza segnali incrementali), con alimentazione 5Vcc.
- Funzione ZWM (Zero Without Motion) per inizializzare posizione di zero lato encoder ttl senza movimento reale dell'asse.
- Segnale di "Fault" inviato nella uscita "encoder simulato" (corrisponde al segnale "UaS" presente in alcuni encoder TTL).
- Possibilità di ridurre il numero di impulsi/giro (PPR), la direzione, la posizione zero della uscita encoder simulato rispetto ai valori letti dall'encoder EnDat.
- Uscite digitali per segnalare:
- Modulo OK (nessun allarme).
- Encoder inizializzato.
- Posizione positiva asse.
- Raggiunta posizione zero encoder simulato.
- Funzione ZWM in corso.
Download
Manuale istruzioni in lingua italiana per modulo convertitore EnDat lineare / Encoder TTL
Dimensioni meccaniche
-
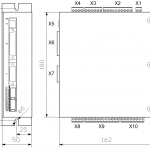
- Dimensioni modulo